当今,力控技术在机器人运动控制中的应用背景非常广泛。力控技术是指利用力传感器作为反馈装置,将力反馈信号与位置控制(或速度控制)输入信号相结合,通过相关的力/位混合算法实现的控制技术。它可以使机器人更加智能地感知和调整与工件、设备或环境之间的接触力,从而实现更精确的运动控制。
在机器人运动控制中,传统的位置控制往往无法满足与环境存在力作用的任务需求。在位置控制下,机器人按照预先设定的位置轨迹进行活动,在遇到障碍物阻挡时,可能导致机器人位置追踪误差增大,机器人会"出力"追踪预设的运动轨迹,导致机器人与障碍物之间产生巨大的内力从而造成零件或机器人本身损坏。
因此,相较于传统的位置控制,力控在机器人运动控制中具有以下优势:
1. 适应性和灵活性:力控可以更好地适应不同的任务需求和环境变化。在面对动态环境和变化的任务时,力控可以使机器人自适应地调整自身的行为和参数,提高适应性和灵活性。而位置控制往往难以适应环境的变化和任务需求。
2. 安全性:力控可以更好地保护机器人和环境,避免因过大的作用力而导致机器人或环境受损。在人与机器人交互的场景中,力控可以更好地感知人的意图和指令,减少因碰撞等原因对人造成的危险。
3. 控制精度和稳定性:通过精确地控制机器人的作用力和运动轨迹,力控可以提高机器人的运动精度和稳定性,确保任务的高质量完成。而位置控制在面对复杂环境和任务时,往往难以保证精度和稳定性。
4. 实现柔顺控制:力控可以使机器人实现柔顺控制,即根据外部环境的变化和指令实时调整机器人的运动轨迹和作用力。这种柔顺控制可以使机器人在执行任务时更加灵活、自然,从而提高机器人的适应性和鲁棒性。
5. 高级别的智能化控制:结合力控技术和机器学习等技术,可以使机器人具备自我优化和改进的能力,实现更高级别的智能化控制。这种高级别的智能化控制可以提高机器人的适应性和自主性,拓展机器人在更多领域的应用前景。
佳安智能自主研发和生产的六维力传感器在机器人运动控制中实现力控有着不可或缺的作用,采用先进的信号处理技术和独特的结构设计,通过测量X、Y、Z三个方向上的力和力矩,可以实现高精度的力控和反应灵敏的运动控制,在工业制造中的主要应用包括打磨、抛光和去毛刺,此外,可以用于自动化柔性装配、机器人拖动示教、产品测试、手术理疗等领域。
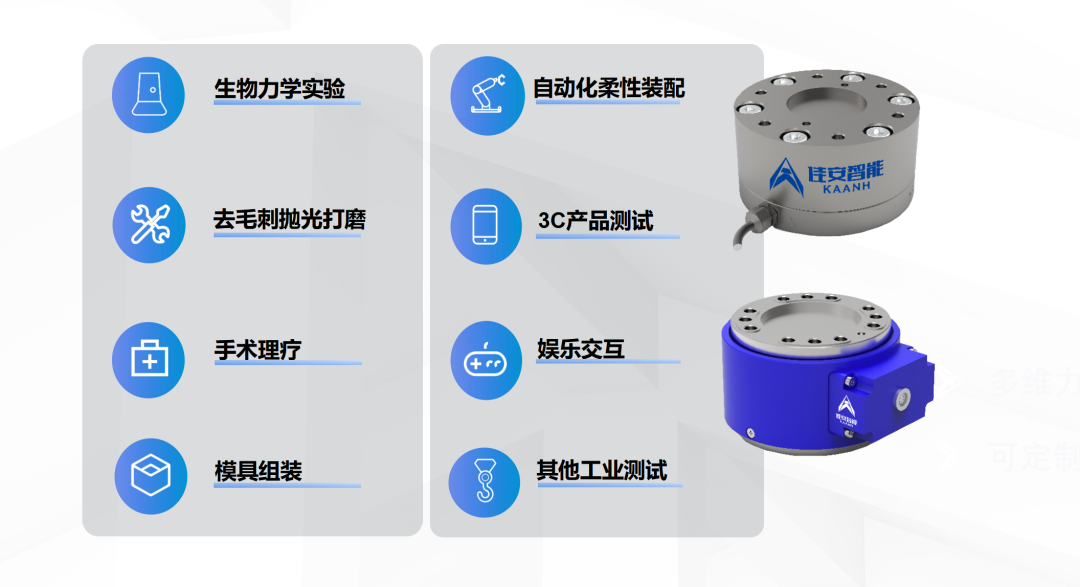
去毛刺抛光打磨:通过精确控制力度和运动轨迹,提升产品质量和生产效率,同时降低对工件的损坏风险。

机器人拖动示教:可实时监测机器人与环境间的接触力,提高机器人的精度和安全性,同时实现快速响应和调整。
总而言之,机器人运动控制中位置控制属于“硬”控制,只要给予指定的位置,则会通过指令达成“目的”;而力控则是“柔”控制,通过不断调整力的大小,从而适用于更多的场景需求。
力控在机器人运动控制中扮演着越来越重要的角色。佳安智能的力控技术在工业自动化领域展现了卓越的性能和广泛的应用前景。通过不断的技术创新和研发投入,佳安智能将继续推动力控技术的发展,为各类工业应用提供更加精准、可靠、高效的解决方案,助力工业自动化迈向新的高度。
 联系电话
联系电话
 联系邮箱
联系邮箱

